- 理工学部
建設現場用運搬ロボットへ搭載するための画像処理AI の研究開発
公開日 2023.05.24最終更新 2024.09.13
簡単に
言うと?工事現場で働く自律移動ロボットが、自分で周りの環境を認識して、賢く人間を手伝う技術です
言うと?工事現場で働く自律移動ロボットが、自分で周りの環境を認識して、賢く人間を手伝う技術です
| 自治体 | 佐賀県 |
|---|---|
| 実施部局 | 理工学部 |
| 研究代表者 | 中山 功一 准教授 |
| 事業分類 | TSUNAGIプロジェクト(令和4年度) TSUNAGIプロジェクト(令和5年度) |

研究概要
産業技術総合研究所と連携した建設現場の運搬ロボットに搭載する画像処理AIを研究開発しました。
研究について
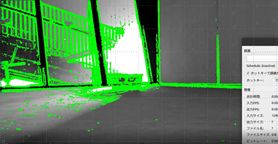
佐賀大学が担当する画像処理AI技術では、運搬する環境をロボットカメラで自動認識して、自己位置推定と環境地図作成を同時に行うSLAM(Simultaneous Localization and Mapping)技術の研究開発に取り組みました。2023年5月にグランドオープンする「SAGAアリーナ」の工事現場にて、佐賀県:県土整備部と戸田建設のご協力の元、カメラとコンピュータを搭載した産総研のロボットを用いて、工事現場の環境地図を作成しました。
-1024x724.jpg)